Robots & Design
Design plays a fundamental role in engineering and how well its solutions can be implemented in the real world. Pablo Valdivia y Alvarado Ph.D.
Design plays a fundamental role in engineering and how well its solutions can be implemented in the real world. Pablo Valdivia y Alvarado Ph.D.
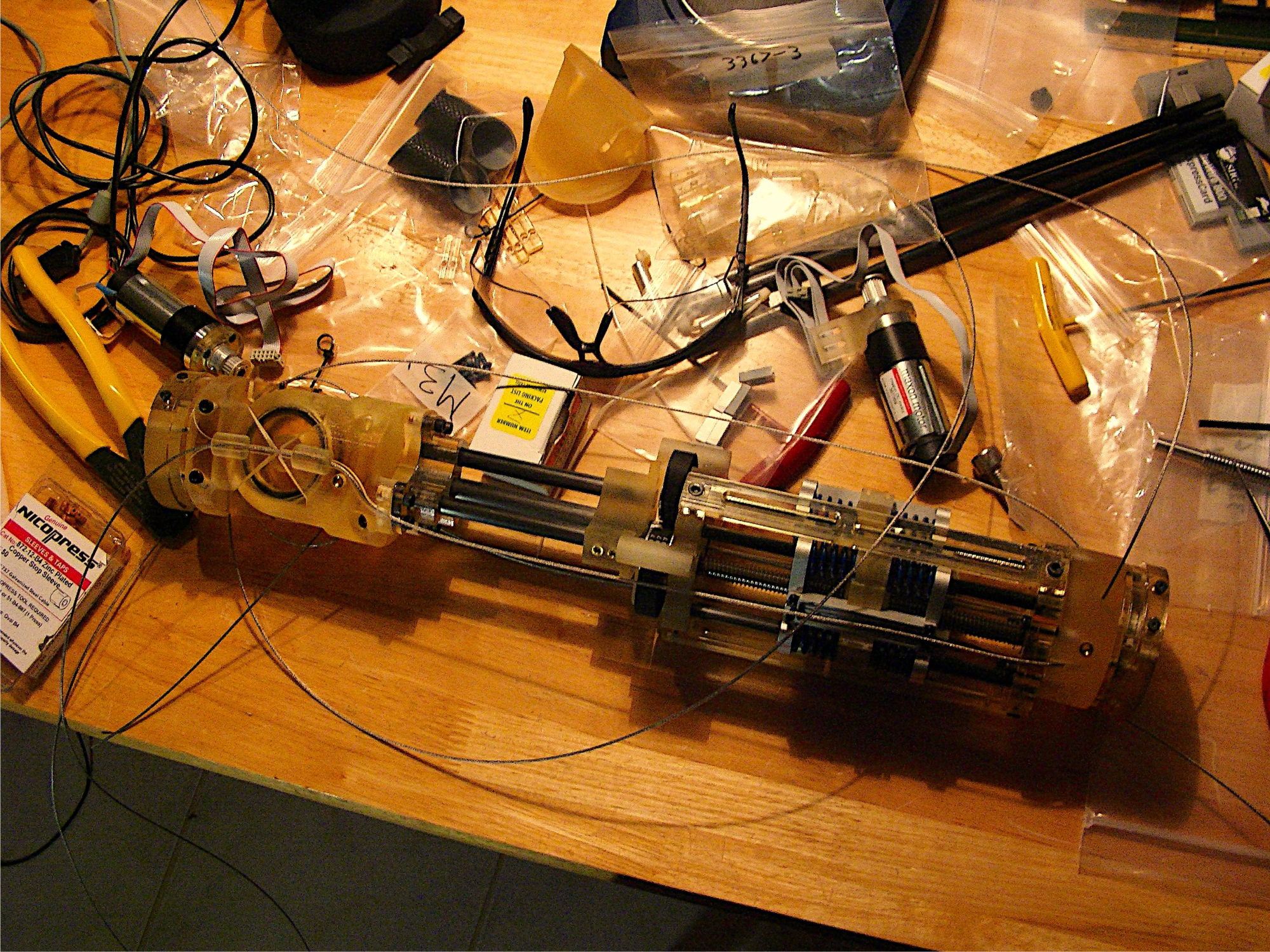
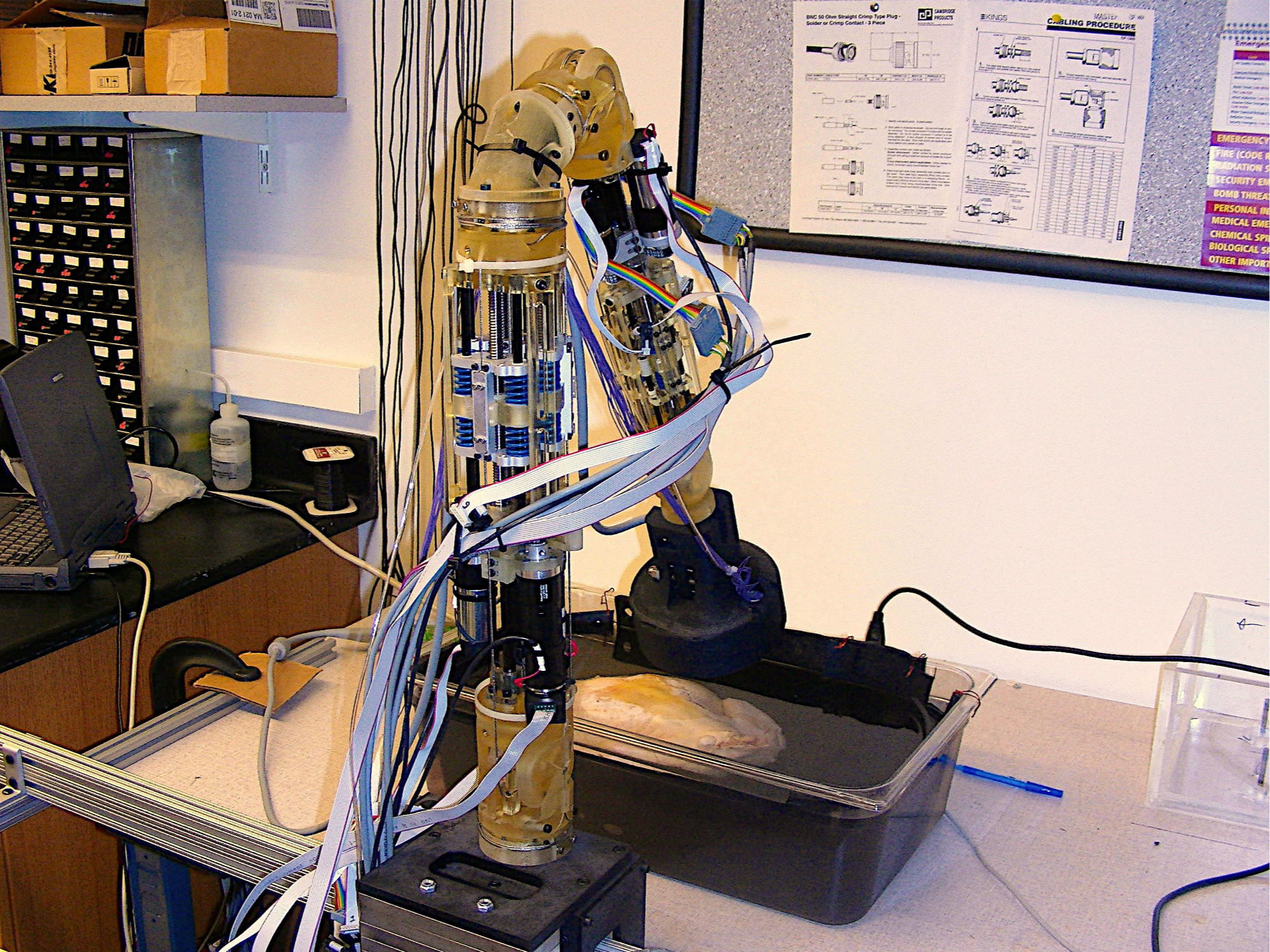

7 DOF manipulator with series-elastic actuators to enable force control. All actuation is packaged inside the arm. The end-effector uses a doppler ultrasound for position feedback and a high intensity focused ultrasound (HIFU) transducer. The manipulator was designed for field trauma care, it can be tele-operated with a phantom. The HIFU transducer can cauterize tissue up to 5 cm below the skin surface to stop hemorrhage and treat non-invasibly other conditions.
{kind=link}